
OpenPlotter- Einbau auf der Friendship
 OpenPlotter – Einbau auf der Friendship
OpenPlotter – Einbau auf der Friendship
Im Beitrag „OpenPlotter auf dem Raspberri PI“ stellte ich euch kurz das Projekt mit den benötigten Komponenten vor. Der Zusammenbau des Systems nahm eine Zeit in Anspruch, da u.a. Lötarbeiten erforderlich waren. Auch musste ein passendes Gehäuse gefunden und anschließend bearbeitet werden.
Nach dem Zusammenbau wurde das Softwarepaket „OpenPlotter“ installiert und konfiguriert. Die erforderlichen freien Seekarten wurden heruntergeladen und in einem Verzeichnis auf dem Raspberry entpackt. Danach musste dieses Verzeichnis in OpenCPN eingetragen werden.
Ein erster „Trockentest“ (ohne AIS) war erfolgreich. Die angeschlossene GPS-Maus übermittelte die Koordinaten einwandfrei. Spannend war nun die Frage, ob auch der AIS-Empfang funktioniert.
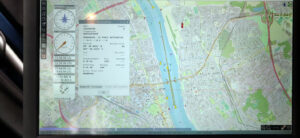
Von mir aus ist es nur ein Katzensprung zum Bonner Rheinufer. Da das System für eine 12 Volt Spannungsversorgung ausgelegt ist, konnte es problemlos im Auto am Zigarettenanzünder betrieben werden. Also ging es zum Rheinufer, um den ersten Test zu absolvieren.
Ich war erstaunt: Alles arbeitete auf Anhieb so, wie ich es erhofft hatte. Die Position wurde sehr genau erkannt und binnen kurzer Zeit erschienen die ersten AIS-Ziele. Test mit Bravour bestanden!
Nachdem der Plotter seine Tests in der Rheinaue Bonn bestanden hat, ging es an die Installation an Bord der O’Libre.

Das gestaltete sich als nicht besonders schwierig. Der Vorbesitzer des Bootes hatte schon für mich nutzbare Kabelkanäle in der Nasszelle montiert, so dass alle Kabel (HDMI, Stromversorgung) für den Monitor nutzbar waren. Am Heck war auch schon ein Antennenträger für GPS und zusätzlicher UKW-Antenne montiert. Die alte UKW-Antenne war für mein AIS nicht nutzbar. Es wurde deshalb eine neue Seefunkantenne montiert. Einzige Schwierigkeit: Die Bohrung für den Antennenfuß musste von 15 auf 16 mm erweitert werde. Bei dem Material handelt es sich um Edelstahl. Aber auch das ließ sich mit einem guten Stufenbohrer letztendlich einfach bewerkstelligen. Auf Grund der Materialstärke musste allerdings von oben und von untern jeweils bis zu Hälfte gebohrt werden.
Dann stellte sich heraus, dass das verlegte Antennenkabel (RG 58) Wasser gezogen hat. Die Schirmung war stark oxidiert um bröselte schon auseinander. Nach Einkürzen des Kabels konnte der Stecker dann letztendlich zwar montiert werden, war aber nur „geflickt“. Ich entschloss mich deshalb, das Kabel durch ein neues zu ersetzen. Ich wählte dieses mal ein qualitativ hochwertiges RG58, da ich ähnliche Erfahrungen mit korrodierten Kabeln auch schon auf der Bavaria gemacht habe. Zugleich zog ich ein weiteres Kabel für eine externe GPS-Antenne ein, die an mein neues Funkgerät angeschlossen werden sollte.

Der Monitor wurde an der Rückwand des Nav-Tisches montiert. Alle Kabel endeten hinter dem Paneel der Bordelektronik. Hier konnte ich auch die USB-GPS-Maus unterbringen. Die Maus haftete magnetisch perfekt an der Hut-Schiene für die Anschlussblöcke. Ich war noch ein wenig skeptisch, was die GPS-Empfangsqualität anging. Aber diese Skepsis stellte sich als unnötig heraus. Das System empfing Daten über eine mehr als genügende Anzahl von Satelliten in guter Signalstärke.
Nach dem Verbinden aller Komponenten stand nun der Live-Test an. Das System wurde gestartet und lief auf Anhieb fehlerfrei. Die GPS Maus, die hinter dem Schaltpanel angebracht wurde, erhielt die Daten in sehr guter Qualität. Sekunden später erschienen auch schon die AIS-Daten der Schiffe im Grevelingen Meer, dann sogar von Schiffen im Hollands Diep. Ich war erstaunt, denn die Reichweite betrug damit ca. 8 sm bis zur Volkerak-Schleuse. Damit hatte ich eine für mich mehr als ausreichende Empfangsreichweite.
Der nächste Test war die Koppelung meines Tablets mit Openplotter, um die AIS-Daten auch in der Navigation-App „Navionics“ darzustellen. Diese Funktion, AIS-Geräte mit dem Tablet zu empfangen, war relativ neu. Auch das funktionierte auf Anhieb.
Bei der Überführungsfahrt konnte das System dann auch seine Praxistauglichkeit beweisen. Allerdings hörten wir während der Fahrt sehr häufig in der Nähe von Schiffe einen lauten, nervtötenden, aber nicht ortbaren Piepton. Es schien, als käme der Ton aus dem Salon. Wir vermuteten, dass es sich um einen AIS-Kollisionsalarm handelte. Nach langem Suchen stellte sich dann heraus, dass dieser Alarm von Navionics generiert wurde. Mein Tablet war oberhalb des Niedergangs montiert und strahlte den Ton in das Schiffsinnere ab. Was ich nicht wusste: Mit Aktivierung der AIS-Funktion in Navionics wird dort auch gleich der Alarm automatisch aktiviert.
Auch wenn ein wenig nervende Suche erforderlich war, zeigte dieses Problem doch auch die Tauglichkeit des Systems.
Die Zukunft wird zeigen, wie groß die Reichweite auf der Nordsee ist.




